Alors c'est vrai que comme dans chaque "spécialité", il y a le vocabulaire qui va avec.
Par exemple, vous si dites à votre boulangère que vous avez un problème de PSB, elle va croire que vous lui annoncez que vos dernières analyses médicales sont mauvaises.

Et dans le petit monde des quadricoptères (vulgairement et faussement appelés "drones"), les acronymes sont nombreux.
Quand Palmito vous dit qu'il a déplacé un stack, il veut dire que sur un choc il a déplacé sa carte électronique qui permet le contrôle de son engin.
Et quand il dit qu'il y a plein de CMS arrachés, il veut dire que les petits composants électroniques qui étaient soudés sur cette carte ont été arrachés lors du choc.
Enfin, quand il pleure sur sa "Pirat Sloop", il site le nom du chassis de son quadricoptère. Le constructeur = "Pirat", et le modèle = "Sloop".
On parle de "stack" lorsque les cartes électroniques sont montées les unes au dessus des autres, formant un "empilement".
Voilà à quoi çà ressemble :

L'intérêt est de pouvoir relier très facilement les cartes entre elles, là où il y a quelques mois, il fallait faire plein de soudures.
Sur l'image ci-dessus, il y a 2 cartes.
La carte supérieure contient tout les capteurs de position (comme sur votre smartphone), le processeur qui gère tout çà, et un port USB qui permet de brancher la carte sur un ordi pour tout paramétrer.
La carte inférieure contient tout ce qui gère la puissance envoyée aux moteurs. Elle doit pouvoir supporter entre 20 et 40 Ampère PAR MOTEUR !
On trouve maintenant des "stack" complètes qui intègrent même l'émetteur vidéo qui envoie les images en provenance de la petite caméra, ainsi que le recepteur radio.

Chaque carte étant enfichée sur la précédente, il n'y a quasiment plus de cables, juste les fils des moteurs à brancher !
D'autres mots bizarres :
La Frame = le chassis du quadricoptère, en carbone. De toutes tailles, la dimension indique l'écart entre 2 moteurs, qui va de 2 pouces, à plus de 5 pouces.

La
FC = le Flight Controler = la carte électronique qui gère les capteurs de mouvements.

Le
VTx = l'émetteur vidéo. Il émet dans la bande de fréquence des 5.8 GHz. La puissance est limitée à 25mW en France.
Le
Rx = le récepteur de radiocommande. Il existe plusieurs format de codage, en fonction de la marque de la radio. Le dialogue est numérique entre la radiocommande et son récepteur, et souvent à double sens. C'est à dire que le récepteur qui est monté dans le quadricoptère est capable de renvoyer des informations à votre télécommande.
On peut ainsi avoir des alarmes qui se déclenchent si la tension de la batterie est trop faible.

Les
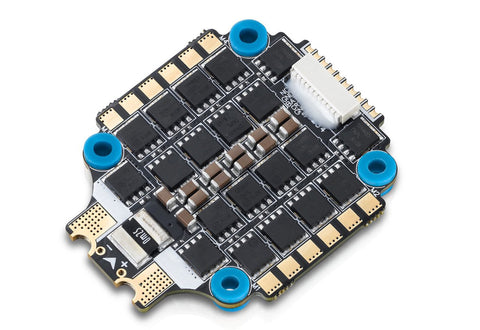
ESC = les modules de puissance qui gèrent le courant envoyé à chaque moteur. Les moteurs sont de type Brushless, très puissants et rapides. Il n'y a pas de "charbons" comme sur un démarreur. Comme je le disais précédemment on trouve maintenant des cartes complètes pour les 4 moteurs.
Les 2 gros pads reçoivent les fils de la batterie
Sur les côtés, on soude 3 fils par moteur.























{kind=link}
![https://image.ouranos.pro/images/2020/03/06/DEF-Grok.2020_petit.jpg[/img]](https://image.ouranos.pro/images/2020/03/06/DEF-Grok.2020_petit.jpg%5B/img){kind=link}